Электромагниты ЭМ44-37
Электромагниты серии ЭМ44 предназначены для дистанционного управления исполнительными механизмами различного промышленного назначения.
Условия эксплуатации
Высота над уровнем моря до 4300м. Диапазон рабочих температур от -40 до +45°С.
Окружающая среда взрывобезопасная, не содержащая пыли в количестве, нарушающем работу электромагнитов, а так же агрессивных газов и паров в концентрациях, разрушающих металлы и изоляцию.
Рабочее положение в пространстве вертикальное с допустимым отклонением 5°влюбую сторону.
Структура условного обозначения эм44-хх-1хх1-20-хз:
— ЭМ- электромагнит;
— 44 — номер серии;
— XX- габарит электромагнита (31, 32, 33, 37);
— 1- обозначение рода тока (переменный);
— X- исполнение по способу воздействия на исполнительный механизм (1 — тянущее, 3 –толкающее и тянущее);
— X- режим работы (относительная продолжительность включения 2 — ПВ 100%, 4 — ПВ 40%, 6 — ПВ 15%); 1- с гибкими выводами; 20 — исполнение по степени защиты (IP20); ХЗ — климатическое исполнение (У, Т) и категория размещения (3).
Технические характеристики электромагнита ЭМ44-37
|
Тип электро- магнита |
Ном. ход якоря, мм |
продолжительность вкл., ПВ, % |
Ном. тяговое усилие, N |
Ном. частота включений в час |
Время срабатывания, мс |
Время возврата, мс |
мощность, Вт, не более |
Противо- действующее усилие, Н |
|
|
начальное |
конечное |
||||||||
| ЭМ44-31 |
15 |
100 40 15 |
21 25 30 |
2200 1600 800 |
200 220 220 |
250 |
16 25 32 |
7 9 15 |
35 37 45 |
| ЭМ44-32 |
20 |
100 40 15 |
30 36 43 |
2000 1000 500 |
250 275 275 |
300 |
17 28 35 |
15 20 25 |
45 50 65 |
| ЭМ44-33 |
20 |
100 40 15 |
50 60 75 |
1800 900 450 |
250 275 275 |
300 |
22 36 45 |
30 40 55 |
70 80 95 |
| ЭМ44-37 |
30 |
100 40 15 |
105 120 150 |
900 600 300 |
150 280 300 |
200 |
66 100 130 |
60 70 90 |
80 100 120 |
|
|
Тип электромагнита |
ЭМ 44-31 |
ЭМ 44-32 |
ЭМ 44-33 |
ЭМ 44-37 |
|
Номинальное напряжение питания , В |
110, 127, 220, 230, 380, 400, 415, 440, 500 для частоты 50 и 60 Гц |
|||
|
Механическая износостойкость , млн . циклов |
4 |
4 |
4 |
1.6 |
|
Масса , кг |
0.8 |
1.25 |
1.35 |
4.0 |
Электромагниты работают при колебаниях напряжения питающей сети в пределах от 0.9 до 1.1 номинального.
|
Тип электромагнита |
ПВ, % |
Ход якоря, мм |
||||||||
|
30 |
25 |
20 |
15 |
10 |
8 |
5 |
3 |
0 |
||
|
Тяговое усилие, Н |
||||||||||
|
ЭМ44-31 |
100 |
— |
— |
— |
21.0 |
21.5 |
23.5 |
25.5 |
28.5 |
55.0 |
|
40 |
— |
— |
— |
25.0 |
25.5 |
27.5 |
29.5 |
32.5 |
62.5 |
|
|
15 |
— |
— |
— |
30.0 |
30.5 |
33.5 |
35.5 |
38.5 |
72.5 |
|
|
ЭМ44-32 |
100 |
— |
— |
30.0 |
33.0 |
37.0 |
38.0 |
40.0 |
44.0 |
75.0 |
|
40 |
— |
— |
36.0 |
39.0 |
43.0 |
44.0 |
46.0 |
50.0 |
90.0 |
|
|
15 |
— |
— |
43.0 |
46.0 |
50.0 |
51.0 |
53.0 |
57.0 |
107.5 |
|
|
ЭМ44-33 |
100 |
— |
— |
50.0 |
52.0 |
53.0 |
55.0 |
60.0 |
65.0 |
125.0 |
|
40 |
— |
— |
60.0 |
62.0 |
63.0 |
65.0 |
70.0 |
75.0 |
150.0 |
|
|
15 |
— |
— |
75.0 |
77.0 |
78.0 |
80.0 |
85.0 |
90.0 |
187.0 |
|
|
ЭМ44-37 |
100 |
105.0 |
120.0 |
125.0 |
140.0 |
165.0 |
— |
180.0 |
— |
262.5 |
|
40 |
120.0 |
140.0 |
150.0 |
165.0 |
185.0 |
— |
206.0 |
— |
300.0 |
|
|
15 |
150.0 |
175.0 |
185.0 |
210.0 |
230.0 |
— |
250.0 |
— |
375.0 |
|
Конструкция и принцип действия ЭМ44-37
Электромагнит серии ЭМ44-37 тянущего исполнения состоит из ярма 1, якоря 2, двух каркасных катушек 3, соединенных последовательно, скоб 4 и накладных направляющих 5, выполненных из термопластичного материала.
Наружные пластины ярма имеют конструктивные элементы для фиксации катушек и крышек на электромагните. В верхней части ярма установлены скобы 6 из немагнитного материала, предотвращающие боковое притяжение якоря к ярму при прохождении магнитного потока через магнитную систему.
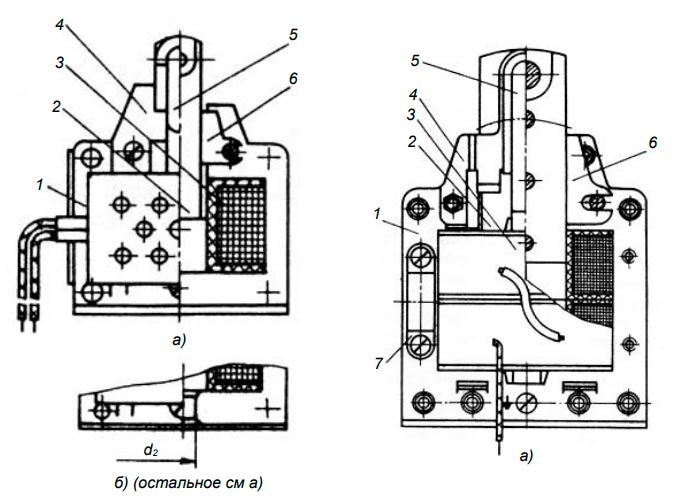
На ярме установлена стойка 7 для присоединения к электромагниту металлорукава.
Электромагниты серии ЭМ44-31, ЭМ44-32, ЭМ44-33 тянущего исполнения состоят из ярма 1, якоря 2, каркасной катушки 3, скоб 4, направляющих 5 и скоб 6.
Электромагниты тянущего и толкающего исполнения отличаются от электромагнитов тянущего исполнения только конструкцией ярма.
При подаче на катушку напряжения происходит втягивание якоря электромагнита. При этом якорь совершает возвратно – поступательное движение.
Возврат якоря в исходное положение после снятия напряжения происходит либо под воздействием силы тяжести, либо под воздействием возвратной пружины исполнительного механизма.